复杂度
- 时间维度:是指执行当前算法所消耗的时间,我们通常用「时间复杂度」来描述。
- 空间维度:是指执行当前算法需要占用多少内存空间,我们通常用「空间复杂度」来描述
—What is Big O?—
O(1):Constant Complexity:Constant 常数复杂度 一次运算
O(log n):Logarithmic Complexity:对数复杂度
O(n):Linear Complexity: 线性时间复杂度(*) 循环n次
O(nlogn):线性对数阶
O(n^2):N square Complexity: 平方 时间复杂度是n^2
O(n^3):N square Complexity: 立方
O(n^k):k次方阶
O(2^n):Exponential Growth:指数
O(n!):Factorial 阶乘
注意:多块代码一起时,只看最高复杂度的运算
时间复杂度

1 | O(1): |
log n 底数直接由分治的复杂度决定,采用二分法,那么就会以2为底数,三分法就会以3为底数,其他亦然。当n趋于无穷大时logx(n)/logy(n)的极限可以发现,极限等于lny/lnx(自然对数,底数为e,e=2.71828…),也就是一个常数,也就是说,在n趋于无穷大的时候,这两个东西仅差一个常数。所以从研究算法的角度log的底数不重要。
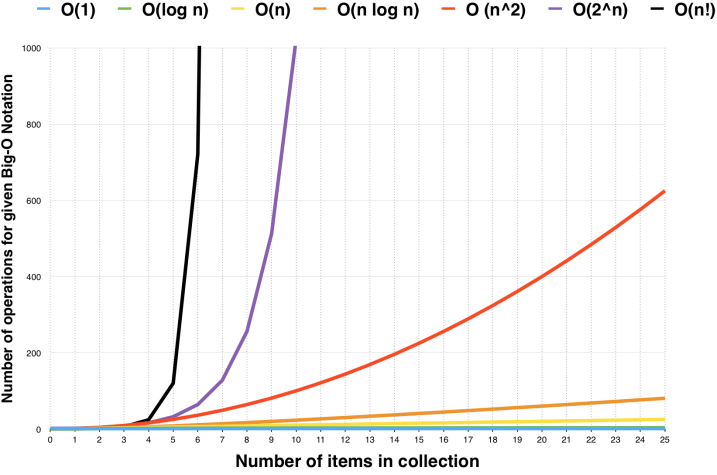
横坐标:n 纵坐标:运行次数
常数、对数、线性、线性对数、平方、指数、阶乘
1 | 计算:1+2+3+...+n |
用算法提高效率
斐波那锲数列(Fibonacci sequence)1、1、2、3、5、8、13、21、34…n
f(n)=f(n-1)+f(n-2)
1 | 递归 |
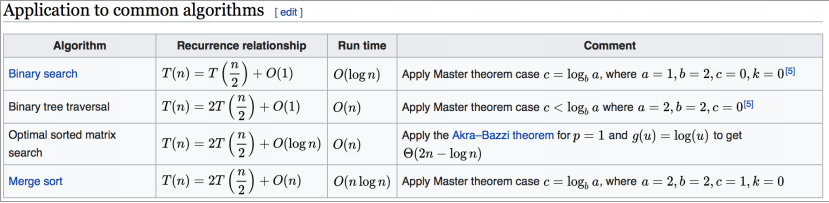
二分查找(Binary search)O(logn):一分为二,只查一边
二叉树遍历(Binary tree traversal):每个节点遍历一次且仅遍历一次O(n)
排序查找(Optimal sorted matrix serach):一维数组二分查找是O(logn)或排好序的二维矩阵的查找(O(n))
排序(Merge sort):(快排,归并排)O(nlogn)
做自己不熟悉的算法题,比如常见的:动态规划,搜索,回溯,递归
https://leetcode.com/problemset/all/
切题:题目的范围、所有解法先思考一遍,找出最优的解法。
经常的面试题:二叉树遍历-前序、中序、后序:什么样子?时间复杂度是多少?
解题:时间复杂度为O(n),n代表二叉树的树的节点总数(通过主定理得到的)不论前序中序后序,它遍历二叉树时,每个节点会访问一次且仅访问一次,所以时间复杂度是线性于二叉树的节点总数,也就是O(n)的时间复杂度。
图的遍历:时间复杂度是多少?-》同理可得是O(n),n代表图中节点总数
搜索算法:DFS(深度优先)、BFS(广度优先)时间复杂度是多少?-》同理可得是O(n),n代表搜索空间里的节点总数
二分查找:时间复杂度是多少?-》logn
空间复杂度
与时间复杂度类似,但更加简单,主要两条原则:
1数组的长度:
例如一维数组,长度为传入元素的个数,一般来说空间复杂度就是O(n),如果是二维数组,数组的长度为n2,空间复杂度就是O(n2)
2递归的深度(特殊说明)
递归的深度就是空间复杂度的最大值,若递归中又开数组,那么两者之间的最大值就是你的空间复杂度。